Project Overview
The Morphing Amphibious Robotic Turtle at Yale (MARTY) is a platform to research the cost of transport, cost of moprhing, shape changing, and stiffness changing capabilites to soft materials. MARTY changes its flipper shape and stiffness to adapt to different environments which minimizes the cost of transport (energy it takes to move forward a certain distance). Additionally, this iteration would be tethered to a gas generator, vacuum pump, and pneumatic pump to change the shape and stiffness of the flipper. We needed to untether the system and put everything onboard to reduce the cost of morphing (energy required to change the shape and/or stiffness of a flipper in a given amount of time).
Your Role and Contributions
- I created 4 versions of a Pneumatic Control Unit (PCU) which used 2 miniature pumps (later, 1) and 4 valves, a motor driver, a darlington transistor array, power sensor, 2 pressure sensors, and a Arduino Nano which would inflate, deflate, soften, or stiffen the flippers all on board. Since the old method used off board pumps for inlfation and deflation while using thermoset epoxy for softening and stiffening, the cost of morphing was in the 275W range. My system decreased cost of morping by an order of magnitude.
- In my final version of the PCU which was a PCB carrier board, I had decreased the size of the morphing actuators from the external pumps to a mere 5 inch by 5 inch circuit. The addition of the pressure sensors allowed for pressure compensation, if there was a leak in the flipper, the sensors could feed data back to the Arduino and actuate the pumps, which was not present before.
- Created a bellow-clamping shoulder which would house the locomotion motors and keep the inside of the bellows dry, decreasing the risk of water damaging the motors.
Skills and Tools
- Circuit Design
- PCB Layout Design
- Altium
- Water Pressure Testing
- Presenting
- Written Communication
- Python Programming
- MATLAB
- Data Analysis and Visualization
Goals and Objectives
- Untether MARTY from external actuators and power
- Waterproof the locomotion motors
- Write a paper to submit to the Conference on Soft Robotics 2024 (RoboSoft)
- Demonstarate a functinoal robot at the Machine learning, Automation, Robotics, and Space (MARS) Conference hosted by Jeff Bezos
Outcomes and Achievements
Visual Aids
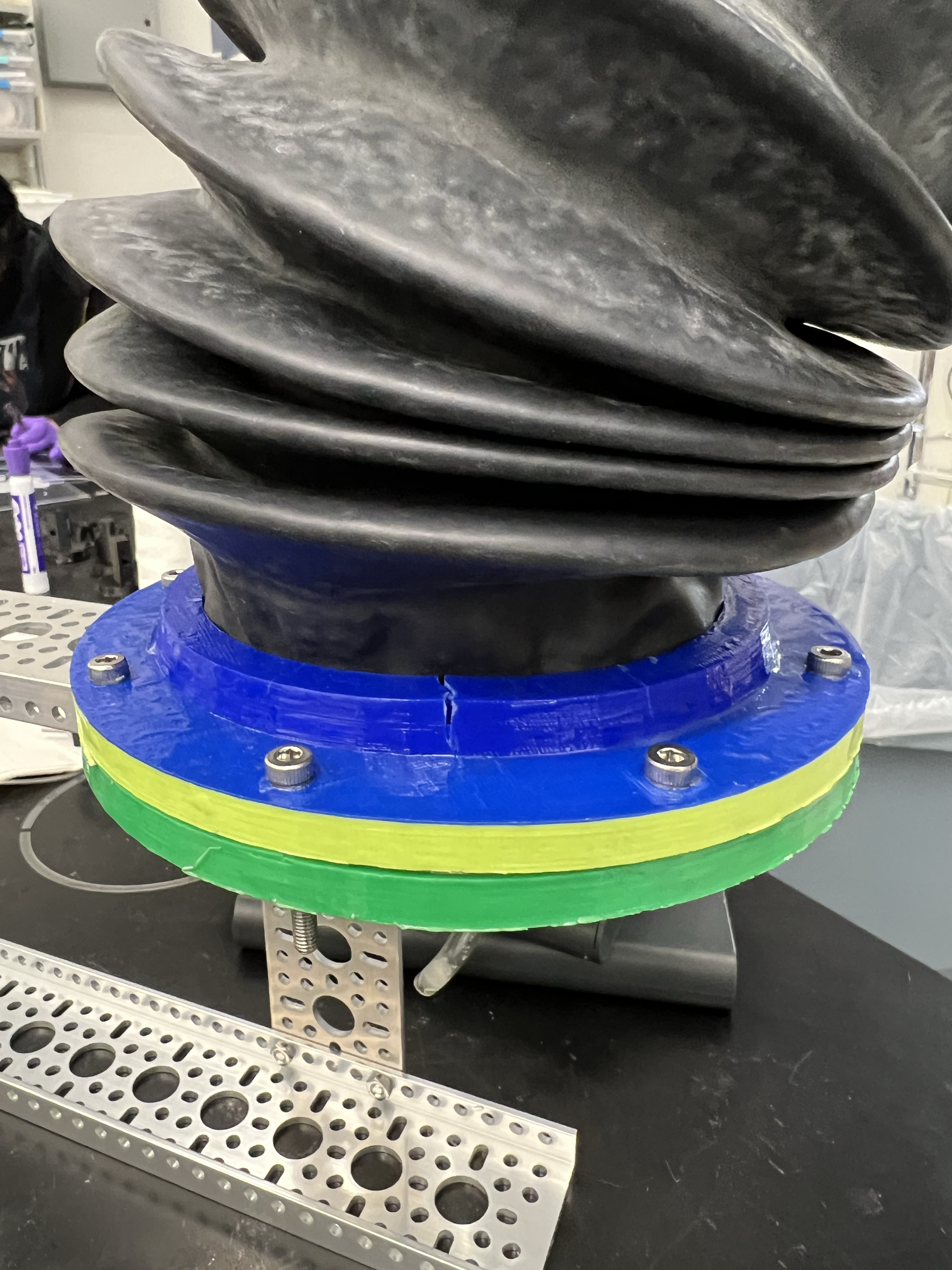
My design for shoulder joints to hold bellows

PCU V4
My demo box functioning
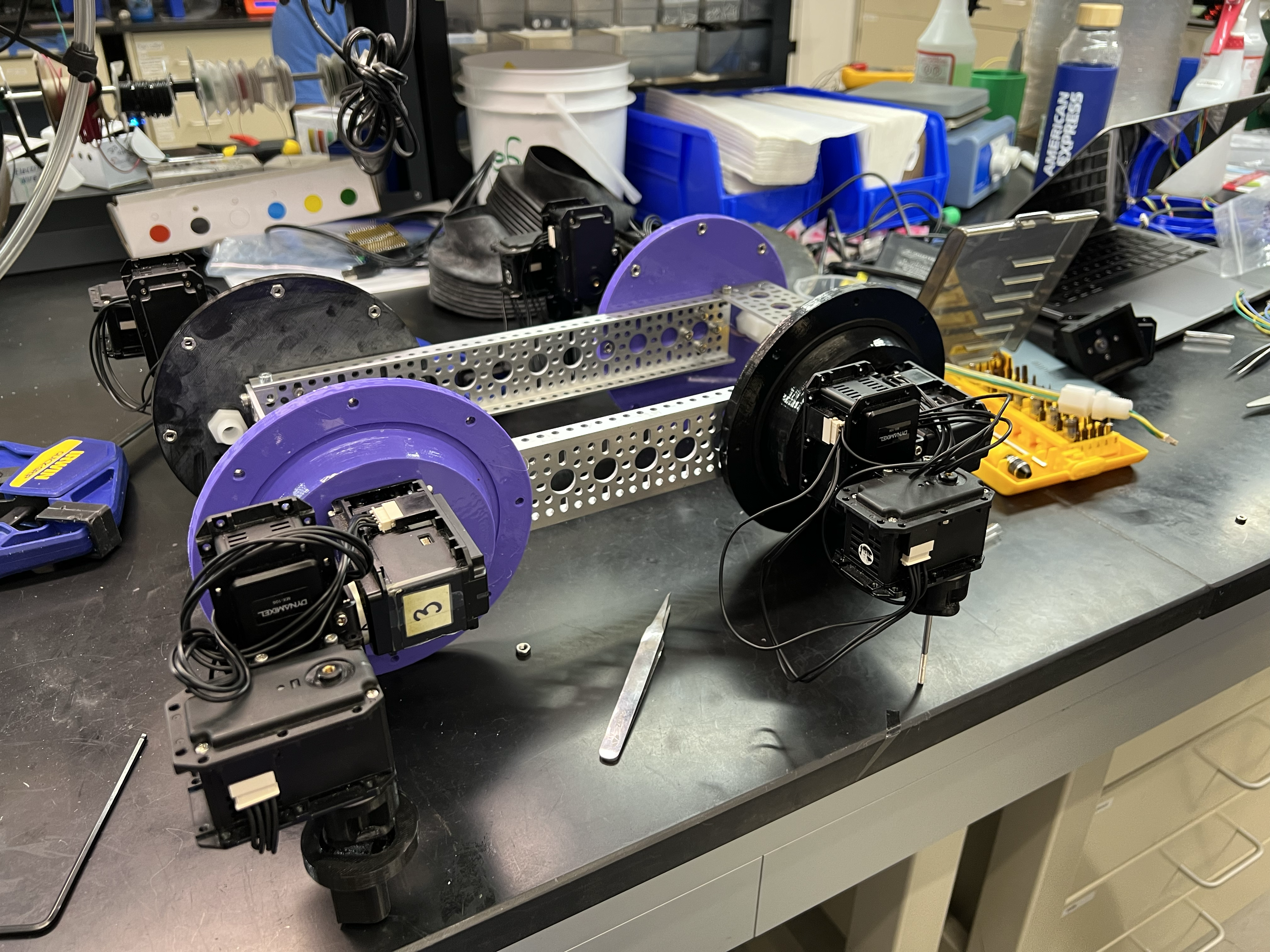
Final iteration of shoulders on robot with motors

My demo boxes, one button for inflation, deflation, stiffening, softening

Functional turtle
ONR Annual Review
RobotSoft 2024 Poster Presentation
Performance Enhancement of a Morphing Limb for an Amphibious Robotic Turtle
Jiefeng Sun, Brandon Lin, Luis A. Ramirez, Esteban Figueroa, Robert Baines, Bilige Yang, Erick Marroquin, and Rebecca Kramer-Bottiglio
Lessons Learned and Technical Takeaways
- This being my first time doing research, I learned that it progress is like a sinusoid, some times it will be slow, sometimes it will be fast, but progress is progress.
- Making mistakes how you learn, so make them quickly and early, that way you learn in the same manner.
- Be thoughtful about experiments, make sure there is a purpose to everything that is being done.
- Data is useless unless you know or learn how to understad what you are looking at.
- Always communicate with the end user in mind, can the person I am writing or talking to understand my work?
Future Work
- I plan on my next project being a programming/control theory intensive project where I close the loop on the robot. This means actually using motor position data and publishing to a topic in ROS2 to get state estimation and reconstruction on the robot.
- Create a simulation in MuJoCo or Gazebo based off this data to do a simulated reconstruction of the robot's motion and environment. This is meant to optimize the robot's gait and lower cost of transport.